Hello! I am Chris Yee Wong, an assistant professor in the Department of Mechanical, Industrial and Aerospace Engineering (MIAE) and the director of the Living with Assistive and Interactive Robots (LAIR) Lab at Concordia University in Montreal, Canada.
The overall goal of my research is to develop robotic assistants for safe, comfortable, and intuitive autonomous physical and social human-robot interaction (psHRI) in the areas of home care, retail, manufacturing, or healthcare. My current research arc involves different aspects of psHRI with humanoid, mobile, and manipulator robots, particularly by examining a) how a robot can infer intention and react appropriately depending on the context by using a multimodal analysis of human posture, gesture, touch, emotional state, physiological signals, environmental signals, etc; b) how robots can be placed in the retail space to enhance and assist the shopping experience of those who might have visual or mobility impairments; and c) how virtrual reality can be used in psHRI.
I am also developing the foundations of Sensor Observability Analysis, a novel way of performing generalized kinematic analysis of distributed axial sensors on articulated robots. My past research involved automation of single cell micromanipulation, quadruped robot control, and hexapod robot leg design.
I am also passionate about teaching using evidence-based techniques, the scholarship of teaching and learning, mentoring, and helping people become better versions of themselves.
On my spare time, I’m a hobbyist maker with my own Etsy store (with corporate clients) and I’m involved in coaching elite youth and university-level dragon boat in the Montreal area. Although my blog Ramblings of a PhD is only occasionally updated, it has recorded some of my thoughts from having started a career in academia.
Feel free to contact me by email 📧: christopheryee[dot]wong[at]concordia[dot]ca
(Note that this website is still a work in progress. Please use the links to my ResearchGate and LinkedIn profiles for a more detailed portfolio.)
- Robotics
- Physical Human-Robot Interaction
- Cooking
- Dragon Boat
Ph.D. in Robotics, 2017
University of Toronto (Toronto, Canada)
M.Eng. in Robotics, 2014
McGill University (Montreal, Canada)
B.Eng. in Mechanical Engineering, 2011
McGill University (Montreal, Canada)
Gallery


Professional Experience
Research Projects

Virtual reality and psHRI
Virtual reality is a powerful tool to achieve contextually-rich interactions while maintaining a low-cost environment for studying psHRI.
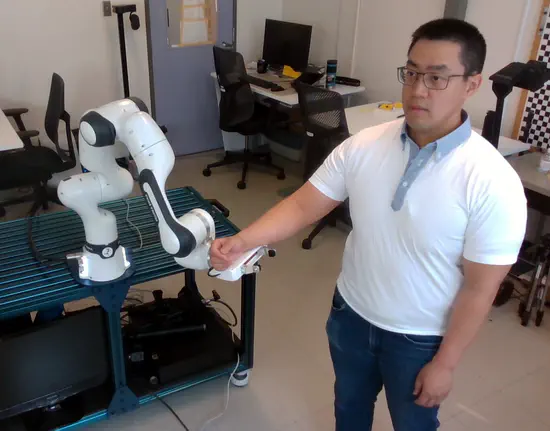
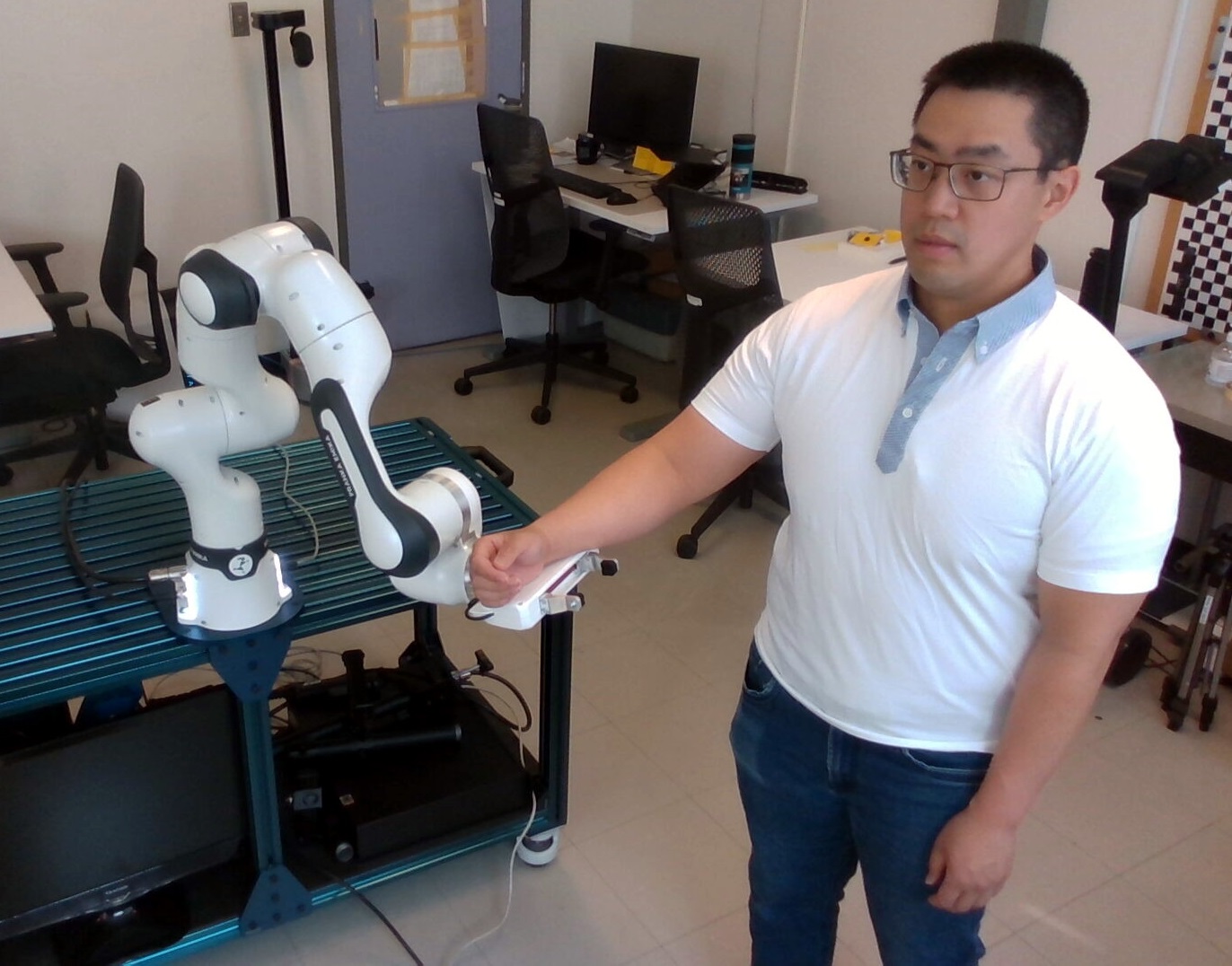
Robot-to-Human Grasping
How and where a robot grasps a human may elicit different emotional responses from the human. What are the key factors and how can robots deliberately exploit these emotional responses to achieve a desired reaction?

Robots in Retail
Exploring the use of robots in retail spaces to assist shoppers, especially to help those may have visual or mobility impairments.
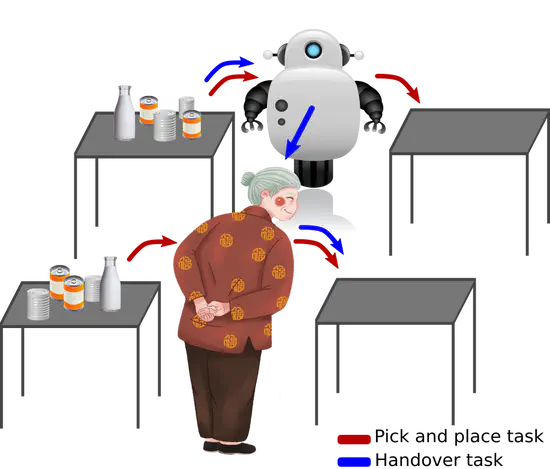
Comfort in psHRI
Users must feel comfortable when interacting with robots prior to mass adoption. This early-stage project involves examining several factors that may involve interactions between robots and humans, especially the elderly.
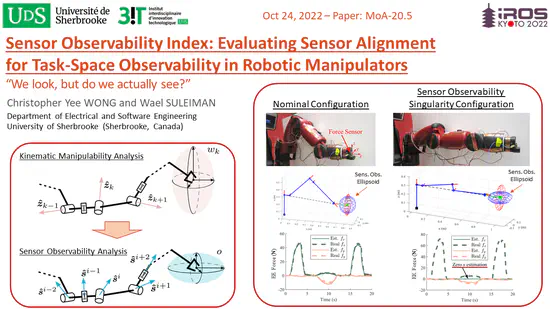
Sensor Observability Analysis
Sensor Observability Analysis aims to quantify the quality of sensor observations of task-space quantities based on the robot configuration.

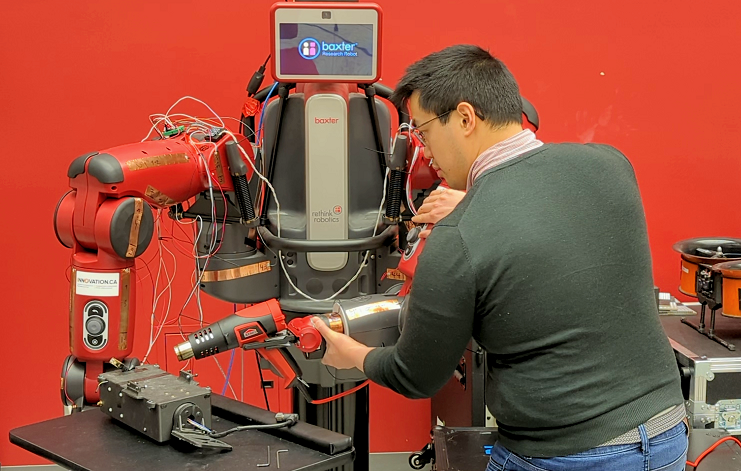
Touch in pHRI
Development of pHRI techniques with a particular focus on multimodal touch interpretation and intention detection for the goal of achieving safe, comfortable, and intuitive autonomous pHRI.
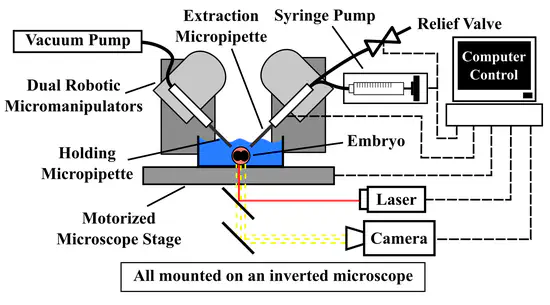
Single Cell Manipulation
Automating single cell surgery and manipulation techniques on early-stage embryos, particluarly related to pre-implantation genetic diagnosis (PGD).

Hyrbrid Quadruped Posture Generation and Step Climbing
Posture reconfiguration and step climbing maneuvers for the hybrid wheel-legged quadruped Micro-Hydraulic Toolkit (MHT). In collaboration with Defense Research and Development Canada (DRDC) Suffield
Recent Publications
Teaching Portfolio
I believe that knowledge cannot be transferred or prescribed; it can only be reconstructed in one’s head.
My overarching philosophy as a teacher, continuously refined over 16 semesters of teaching experience as both course instructor and teaching assistant, is to act as a guide for students such that they stay engaged in the learning process and solve problems by their own reasoning. The goal is to help students in reconstructing new knowledge for themselves through a mix of evidence-based educational techniques and my own creativity to ensure that my methods are effective.
I’m always interested in new teaching philosophies and methods, so feel free to reach out to me if you want to start a discussion!
(The entries below are my experience as a course instructor, except for the last entry.)
- Overall rating 4.7/5
- Semesters taught: Fall 2023, Winter 2024
- For some student comments, please view my McGill RateMyProfessors profile.
- Overall rating 4.71/5, enthusiasm 4.94/5, and approachability 4.94/5
- Semesters taught: Fall 2021
- For some student comments, please view my Concordia RateMyProfessors profile.
- Overall rating 4.2/5, enthusiasm 4.7/5, and approachability 4.6/5
- (Comparatively, the departmental average overall rating was 3.7/5)
- Semesters taught: Fall 2016
Two latest student evaluations as a TA: 4.7/5 and 4.5/5
- Université de Sherbrooke (Oct 2021 – Dec 2022)
- GEL 521 Identification et modélisation (Fall 2021, 2022)
- University of Toronto (Sept 2013 – Dec 2017)
- MIE 422F Automated Manufacturing (Fall 2013-2015 and 2017)
- MIE 402S Vibrations (Spring 2014-2017)
- MIE 1064F Control Methods with Applications to Robotics (Fall 2017)
- McGill University (Sept 2011 – Dec 2011)
- MECH 260 Machine Tool Laboratory (Fall 2011)