Robot-to-Human Grasping
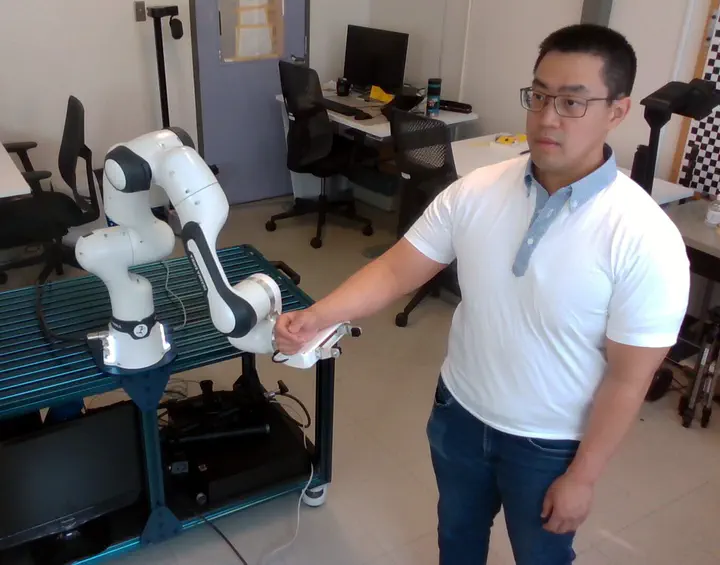
During interactions between a human and a robot, there may be a time when a robot must purposefully come into contact or grasp human (e.g., a robot grasps a human’s hand to physically guide them to perform a task, to teach a motion, or to provide stability and support). Depending on how the robot grasps the human (e.g., grasp location, orientation, force, and open/closed grip), different grasp types may elicit different emotional responses from the human. The goal of the project is to investigate what robot-to-human (R2H) contact/grasp factors affect the perceived safety and comfort of the interaction and how it differs from the similar human-to-human (H2H) contact/grasping.