Robot-to-Human Grasping
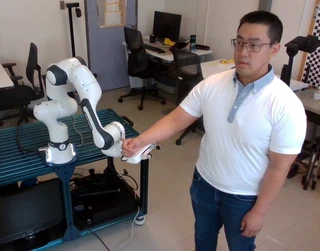
During interactions between a human and a robot, there may be a time when a robot must purposefully come into contact or grasp human (e.g., a robot grasps a human’s hand to physically guide them to perform a task, to teach a motion, or to provide stability and support). Depending on how the robot grasps the human (e.g., grasp location, orientation, force, and open/closed grip), different grasp types may elicit different emotional responses from the human. The goal of the project is to investigate what robot-to-human (R2H) contact/grasp factors affect the perceived safety and comfort of the interaction and how it differs from the similar human-to-human (H2H) contact/grasping.

I am Chris Yee Wong, an assistant professor in the Department of Mechanical, Industrial and Aerospace Engineering (MIAE) and the director of the Living with Assistive and Interactive Robots (LAIR) Lab at Concordia University in Montreal, Canada.
The overall goal of my research is to develop robotic assistants for safe, comfortable, and intuitive autonomous physical and social human-robot interaction (psHRI) in the areas of home care, retail, manufacturing, or healthcare. My current research arc involves different aspects of psHRI with humanoid, mobile, and manipulator robots, particularly by examining a) how a robot can infer intention and react appropriately depending on the context by using a multimodal analysis of human posture, gesture, touch, emotional state, physiological signals, environmental signals, etc; b) how robots can be placed in the retail space to enhance and assist the shopping experience of those who might have visual or mobility impairments; and c) how virtrual reality can be used in psHRI.
I am also developing the foundations of Sensor Observability Analysis, a novel way of performing generalized kinematic analysis of distributed axial sensors on articulated robots. My past research involved automation of single cell micromanipulation, quadruped robot control, and hexapod robot leg design.
I am also passionate about teaching using evidence-based techniques, the scholarship of teaching and learning, mentoring, and helping people become better versions of themselves.
On my spare time, I’m a hobbyist maker with my own Etsy store (with corporate clients) and I’m involved in coaching elite youth and university-level dragon boat in the Montreal area. Although my blog Ramblings of a PhD is only occasionally updated, it has recorded some of my thoughts from having started a career in academia.
Feel free to contact me by email: christopheryee[dot]wong[at]concordia[dot]ca
(Note that this website is still a work in progress. Please use the links to my ResearchGate and LinkedIn profiles for a more detailed portfolio.)