Sensor Observability Analysis
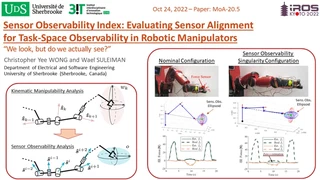
Sensor Observability Analysis, akin to the kinematic manipulability index, is a novel performance metric for articulated robotic mechanisms. The goal is to analyse and evaluate the performance of robot-mounted distributed directional or axial-based sensors to observe specific axes in task space as a function of joint configuration. For example, joint torque sensors are often used in serial robot manipulators and assumed to be perfectly capable of estimating end effector forces, but certain joint configurations may cause one or more task-space axes to be unobservable as a result of how the joint torque sensors are aligned. The proposed sensor observability analysis provides a method to analyse the cumulative quality of a robot configuration to observe the task space. The resultant metrics can then be used in optimization and in null-space control to avoid sensor observability singular configurations or to maximize sensor observability in particular directions. Parallels are drawn between sensor observability and the traditional kinematic Jacobian for the particular case of joint torque sensors in serial robot manipulators. Compared to kinematic analysis using the Jacobian in serial manipulators, sensor observability analysis is shown to be more generalizable in terms of analysing non-joint-mounted sensors and can potentially be applied to sensor types other than for force sensing, e.g., link-mounted proximity sensors. We demonstrate the utility and importance of sensor observability in physical interactions using simulations and experiments of a custom 3-DOF robot and the Baxter robot.
Related Research Items:
- C. Y. Wong and W. Suleiman, “Sensor Observability Analysis for Maximizing Task-Space Observability of Articulated Robots,” in IEEE Transactions on Robotics, 2024. (Accepted)
- C. Y. Wong and W. Suleiman, “Sensor Observability Index: Evaluating Sensor Alignment for Task-Space Observability in Robotic Manipulators,” 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Kyoto, Japan, 2022, pp. 1276-1282.

I am Chris Yee Wong, an assistant professor in the Department of Mechanical, Industrial and Aerospace Engineering (MIAE) and the director of the Living with Assistive and Interactive Robots (LAIR) Lab at Concordia University in Montreal, Canada.
The overall goal of my research is to develop robotic assistants for safe, comfortable, and intuitive autonomous physical and social human-robot interaction (psHRI) in the areas of home care, retail, manufacturing, or healthcare. My current research arc involves different aspects of psHRI with humanoid, mobile, and manipulator robots, particularly by examining a) how a robot can infer intention and react appropriately depending on the context by using a multimodal analysis of human posture, gesture, touch, emotional state, physiological signals, environmental signals, etc; b) how robots can be placed in the retail space to enhance and assist the shopping experience of those who might have visual or mobility impairments; and c) how virtrual reality can be used in psHRI.
I am also developing the foundations of Sensor Observability Analysis, a novel way of performing generalized kinematic analysis of distributed axial sensors on articulated robots. My past research involved automation of single cell micromanipulation, quadruped robot control, and hexapod robot leg design.
I am also passionate about teaching using evidence-based techniques, the scholarship of teaching and learning, mentoring, and helping people become better versions of themselves.
On my spare time, I’m a hobbyist maker with my own Etsy store (with corporate clients) and I’m involved in coaching elite youth and university-level dragon boat in the Montreal area. Although my blog Ramblings of a PhD is only occasionally updated, it has recorded some of my thoughts from having started a career in academia.
Feel free to contact me by email: christopheryee[dot]wong[at]concordia[dot]ca
(Note that this website is still a work in progress. Please use the links to my ResearchGate and LinkedIn profiles for a more detailed portfolio.)